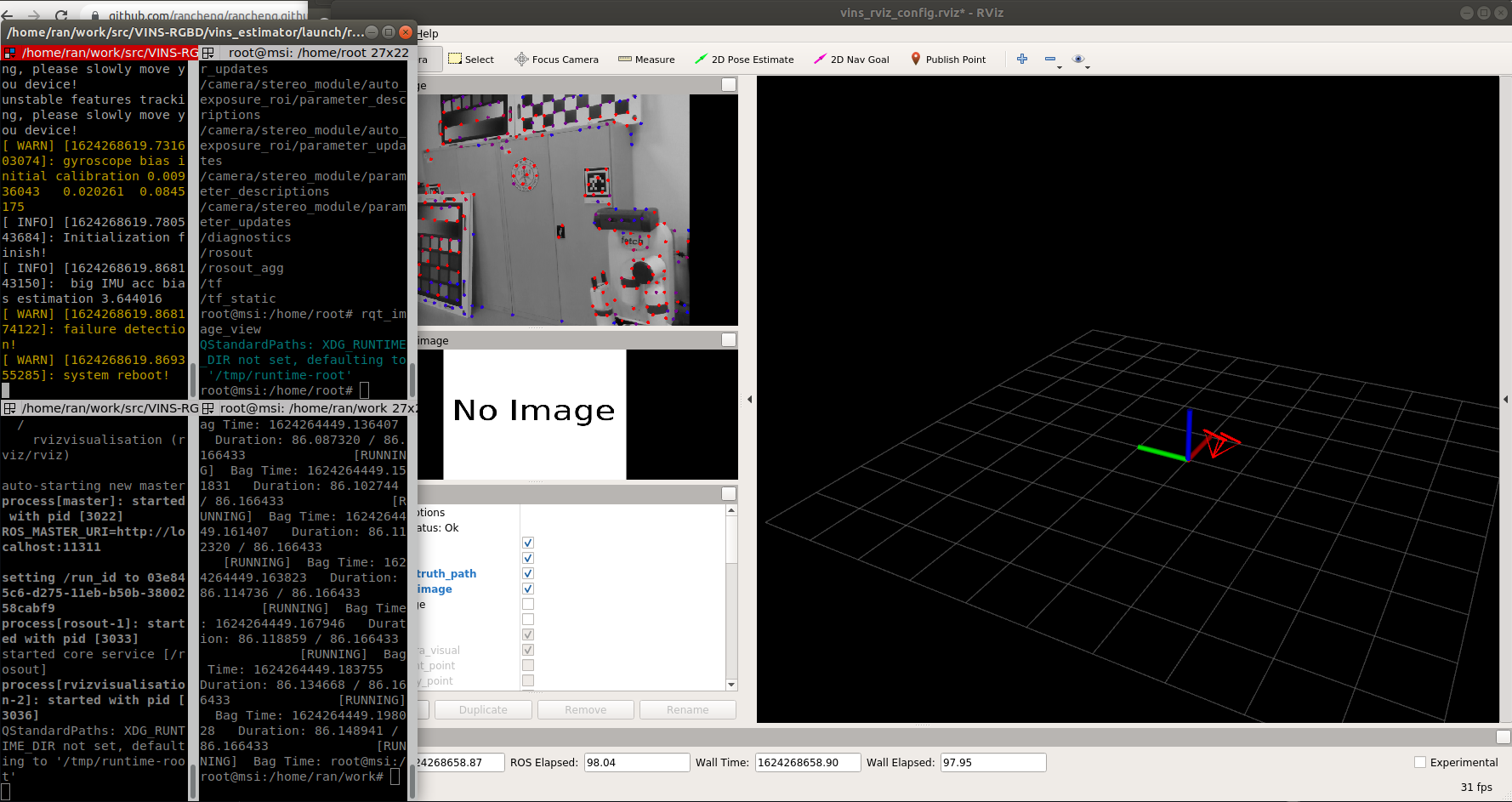
ROS GUI in docker
This post documented my experiments on VINS and ros under docker.
VINS-RGBD Development guide
VINS-RGBD is evolved from VINS-Mono, and has been suited for realsense D455, this tutorial meant to explore this algorithm for RGBD camera and do SLAM on low-cost machines.
Test Env Build
Before start here is a test playground for us to do algorithm optimization, we are conducting all the experiments on docker. Please make sure you have successfully installed docker-CE, and nvidia-container-runtime:
# apt install dependencies
$ curl -s -L https://nvidia.github.io/nvidia-container-runtime/gpgkey | sudo apt-key add -
$ distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
$ curl -s -L https://nvidia.github.io/nvidia-container-runtime/$distribution/nvidia-container-runtime.list | sudo tee /etc/apt/sources.list.d/nvidia-container-runtime.list
# nvidia-container-runtime installation
$ sudo apt update
$ sudo apt install nvidia-container-runtime
# docker service restart
$ sudo systemctl restart docker.service
Register user ID in docker
$ sudo usermod -a -G docker `id -un`
$ sudo systemctl restart docker.service
build docker image
$ git clone https://github.com/chikuta/chikuta-dockerfiles.git
$ cd chikuta-dockerfiles
$ ./docker/ros-bionic-melodic/build-docker-image.bash
execute the docker container, this will create a x11 forward gui terminal for your application
$ cd chikuta-dockerfiles
$ ./docker/ros-bionic-melodic/run-docker-container.bash
Then you will be able to open all the gui applications like you are in the host machine
RealSense2 Related
test Rig: D455 OS: Ubuntu 18.04 —
The following command helps to export the topics of realsense sensor, what it does is its publishing color image and aligned depth image to rgb coordinate with RGB/depth frame rate at 30 fps and IMU frame rate at 200 fps.
roslaunch realsense2_camera rs_camera.launch device_type:=d455 enable_gyro:=true enable_accel:=true align_depth:=true unite_imu_method:=linear_interpolation color_width:=640 color_height:=480 color_fps:=30 depth_width:=640 depth_height:=480 depth_fps:=30
install opencv 3.4 with ppa:
sudo add-apt-repository ppa:timsc/opencv-3.4
sudo apt install libopencv*3.4*
Use the following command to query the intrisics and extrinsics:
rs-enumerate-devices -c
For extrinsics, what you need is color to gyro/accelerator, which is the [R|t] transformation matrix converting from camera coordinate to IMU coordinate.
Extrinsic from "Color" To "Gyro" :
Rotation Matrix:
0.999997 0.00215989 -0.000678808
-0.00215933 0.999997 0.000815037
0.000680566 -0.000813569 0.999999
Translation Vector: 0.0290079656988382 0.00740037159994245 0.0156494211405516
and for intrinsics, what you need is the fx, fy, cx, cy and distortion matrix:
Intrinsic of "Color" / 640x480 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 640
Height: 480
PPX: 311.377532958984
PPY: 247.430999755859
Fx: 381.151916503906
Fy: 380.847564697266
Distortion: Inverse Brown Conrady
Coeffs: -0.0573863908648491 0.0686274990439415 -0.000280521548120305 -0.000220020971028134 -0.0218628235161304
FOV (deg): 80.02 x 64.42
Here Coeffs means [k1, k2, p1, p2, p3].
Here’s my configuration for D455 with EuRoC setup:
realsense_color_config_d455.yaml
Good luck!